
智能客服
常见问题
公众号
二维码
二维码


| 服务名称 | 服务含义 |
|---|---|
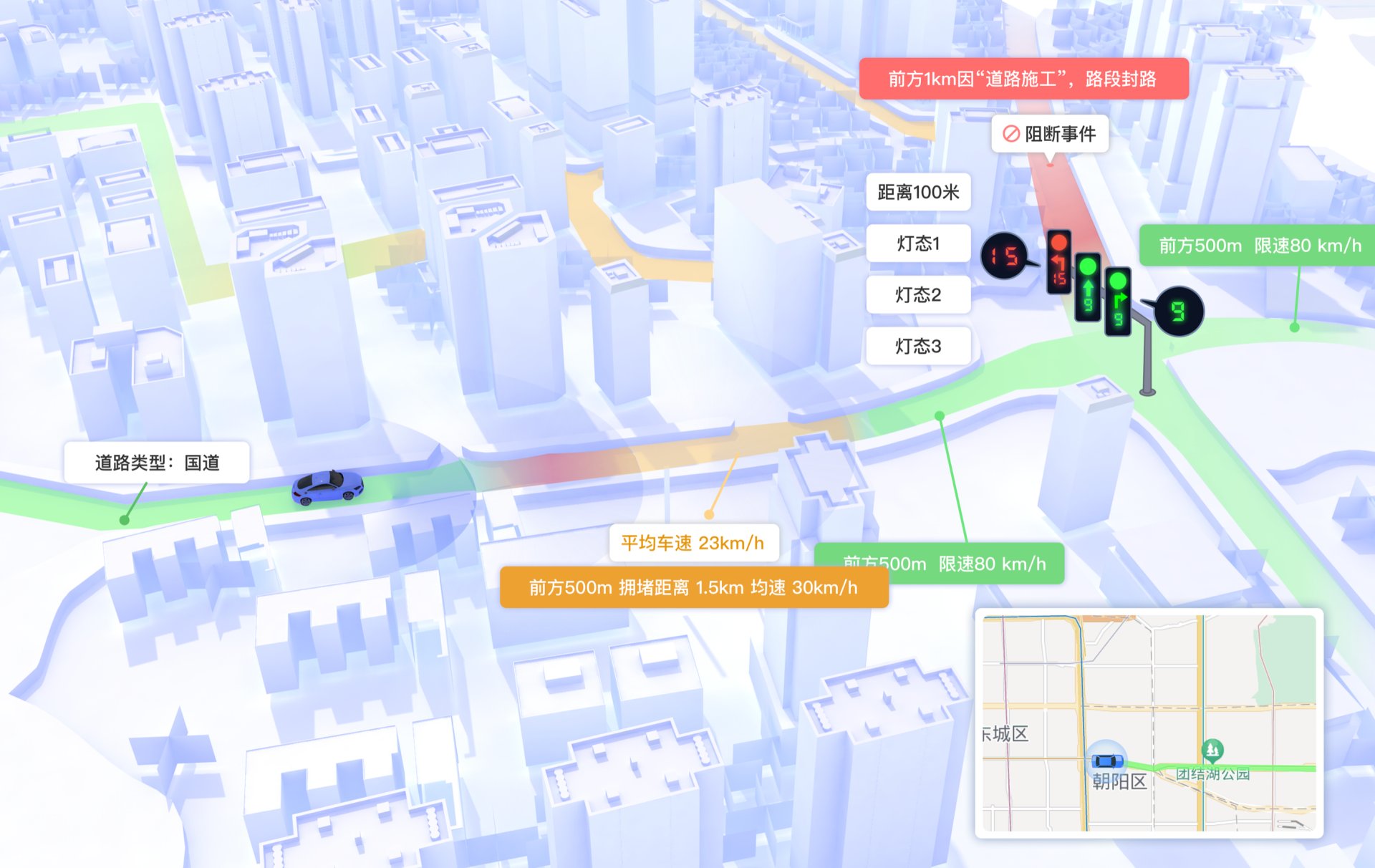
| 全局静态数据 | 路线规划后线路上的坡度,曲率,限速。 |
| 局部路网 | 车辆启动时与服务端建立连接,然后开始按1hz频率上报车辆位置数据,当车辆前方出现路口时,服务端下发车辆前方的道路拓扑,以及当前车辆所在的位置。 |
| 道路类型 | 前方道路类型,例如:乡镇村道,步行道路,省道,其它道路,特服道路,国道,高速道路,轮渡,县道,城市高速。 |
| 限速 | 返回前方道路的道路限速,单位:千米/小时,支持小客车及货车。 |
| 实时路况 | 返回前方道路的拥堵状况,畅通,缓行,拥堵,严重拥堵。同时返回平均通行速度。 |
| 红绿灯倒计时 | 返回前方路口不同行驶流向的红绿灯灯态,例如:直行,左转,右转;灭灯,红灯,绿灯,黄灯。 |
| 动态事件 | 返回前方道路的动态交通事件信息,例如:交通事故,管制,能见度,道路通行设施损毁,路面塌陷,恶劣天气,自然灾害,大型活动,公共安全事件等几十种动态交通信息。 |
| 坡度曲率 | 道路的相对坡度及曲率。 |



下一篇
本篇文章对您是否有帮助?